gspt1:=((((CLOSE*2)+HIGH)+LOW)/4);
gspt2:=(EMA(gspt1,1)-EMA(gspt1,40));
gspt3:=((gspt2-EMA(gspt2,5))*100);
gspt4:=IF((gspt3<-20),-20,IF((gspt3>100),100,gspt3));
gspt5:=(((CLOSE-LLV((1.02*LOW),20))/(HHV(HIGH,20)-LLV(LOW,20)))*100);
gspt6:=IF((gspt5>100),100,IF((gspt5<0),0,gspt5));
gspt7:=(((HHV(HIGH,5)-CLOSE)/(HHV(HIGH,5)-LLV(LOW,5)))*20);
gspt8:=(((3*gspt7)-(2*SMA(gspt7,3,1)))*1);
gspt9:=IF((gspt8>100),100,IF((gspt8<-5),-5,gspt8));
gspt10:=(((HHV(HIGH,13)-CLOSE)/(HHV(HIGH,13)-LLV(LOW,13)))*120);
gspt11:=IF((gspt10>100),100,gspt10);
gspt12:=CROSS(gspt9,gspt4);
gspt13:=((gspt11=0) AND CROSS(gspt4,40));
gspt14:=((gspt11=0) AND (gspt9<0));
gspt15:=CROSS(gspt4,40);
gspt16:=(gspt4=100);
gspt17:=((CLOSE/REF(CLOSE,1))>1.095);
gspt18:=(gspt11=100);
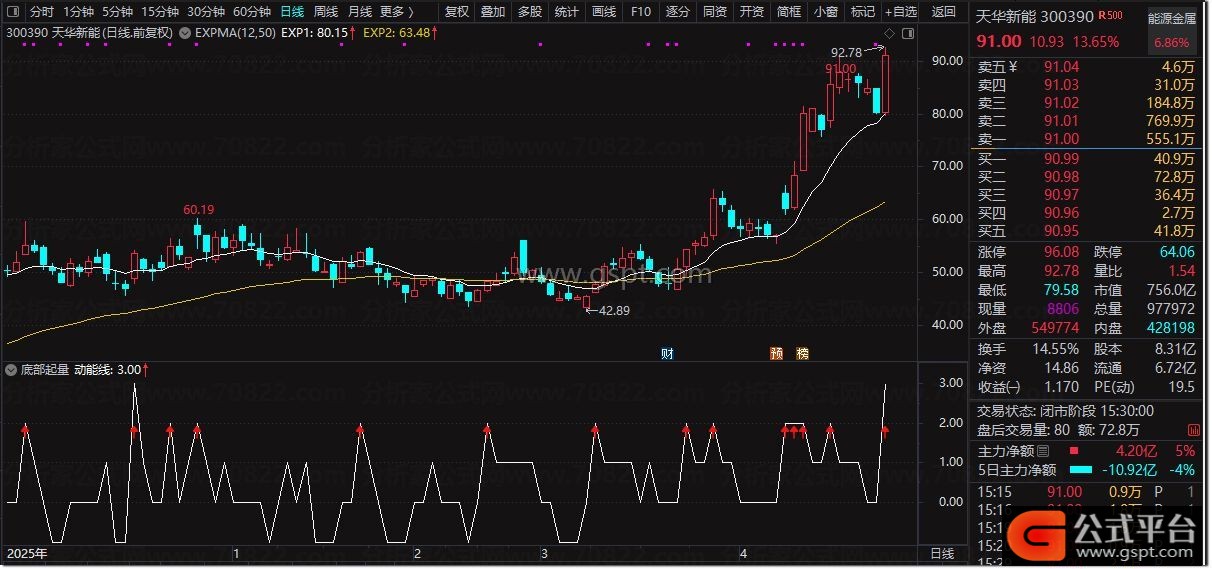
动能线:((((((gspt12+gspt13)+gspt14)+gspt15)+gspt16)+gspt17)-gspt18);
DRAWICON((((((((gspt12+gspt13)+gspt14)+gspt15)+gspt16)+gspt17)-gspt18) >= 2),2,1);